 DIODE: A Dense Indoor and Outdoor DEpth Dataset
DIODE: A Dense Indoor and Outdoor DEpth Dataset
Authors:
Igor Vasiljevic,
Nick Kolkin,
Shanyi Zhang,
Ruotian Luo,
Haochen Wang,
Falcon Z. Dai,
Andrea F. Daniele,
Mohammadreza Mostajabi,
Steven Basart,
Matthew R. Walter,
Gregory Shakhnarovich.
Affiliations:
TTI-Chicago,
University of Chicago,
Beihang University.
Introduction
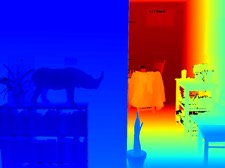
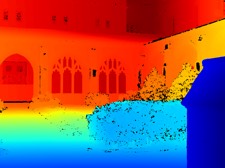
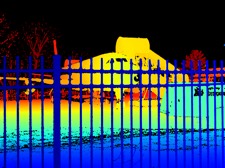
DIODE (Dense Indoor and Outdoor DEpth) is a dataset that contains diverse high-resolution color images with accurate, dense, far-range depth measurements. It is the first public dataset to include RGBD images of indoor and outdoor scenes obtained with one sensor suite. For more information, please refer to our technical report. More samples can be found in dataset sample gallery.











![]()
News
DIODE Dataset
Dataset Download
We have released the train and validation splits of DIODE depth and DIODE normal, including RGB images, depth maps, depth validity masks and surface normal maps.
Download links:
| Partition | Amazon Web Service | Baidu Cloud Storage | MD5 Hash |
| Train (81GB) | train.tar.gz | train.tar.gz | 3a94632398fe1d002d89f11743f748b1 |
| Validation (2.6GB) | val.tar.gz | val.tar.gz | 5c895d09201b88973c8fe4552a67dd85 |
| Partition | Amazon Web Service | Baidu Cloud Storage | MD5 Hash |
| Train (126GB) | train_normals.tar.gz | train_normals.tar.gz | 9c0617ebe1eaf1928fdf3344e1c42aef |
| Validation (4.6GB) | val_normals.tar.gz | val_normals.tar.gz | 323ccaf60abebdb59705dcd8b529d709 |
*.csv) files that list all instances in the train and val set of DIODE Dataset. Dataset Layout
DIODE data is organized hierarchically. Detailed structure is shown as follows:
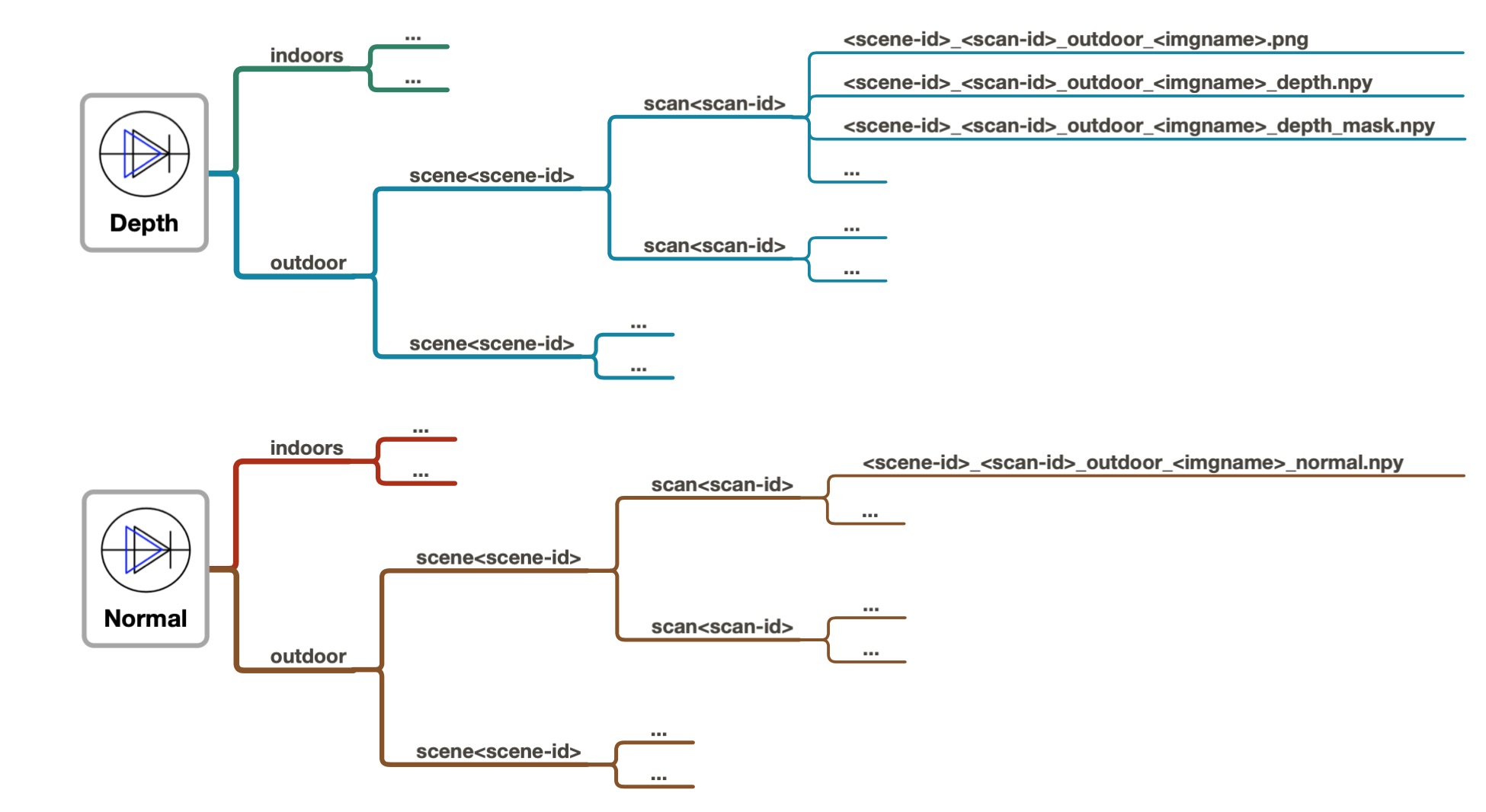
Description: A 'scene' usually corresponds to a somewhat compact location/vicinity, such as interior (or a single floor) of a building, surroundings of a landmark, neighborhood, etc. A 'scan' corresponds to a single data acquisition by the scanner, resulting in a set of crops, all taken from the same position. Multiple scans within the same scene may or may not have overlap in the physical points they capture; scans in distinct scenes will typically have no overlap. Note that we use the name of "indoors" and "outdoor" to keep the characters constant.
File Naming Conventions and Formats
The dataset consists of RGB images, depth maps, depth validity masks and surface normal maps. Their formats are as follows:
RGB images (*.png): RGB images with a resolution of 1024 × 768.
Depth maps (*_depth.npy): Depth ground truth with the same resolution as the images.
Depth masks (*_depth_mask.npy): Binary depth validity masks where 1 indicates valid sensor returns and 0 otherwise.
Surface normal maps (*_normal.npy): Surface normal vector ground truth with the same resolution as the images. Invalid normals are represented as (0,0,0).
Dataset Feature
- Sensor Performance: – Return Density: 99.6% (indoor) / 66.9% (outdoor)
- Diversity: – Time: both daytime and night, several months (summer, fall, winter).
- Example of Data Acquisition:
– Depth Precision: ±1 mm
– Angular Resolution: 0.009°
– Max Range: 350 m
– Min Range: 0.6 m
Learn more about the laser scanner.
– Location: data collection in several cities, various indoor/outdoor scene and background layout.
– Dataset Curation: manually selected image crops with diverse objects.

Dataset Statistics
- Partitioning:
- Depth Distribution:
- Legend:
| train | indoors | 7 scenes | 80 scans | 8574 images |
| train | outdoor | 12 scenes | 100 scans | 16884 images |
| val | indoors | 3 scenes | 10 scans | 325 images |
| val | outdoor | 3 scenes | 10 scans | 446 images |
| test | indoors | 2 scenes | 20 scans | 753 images |
| test | outdoor | 3 scenes | 20 scans | 876 images |
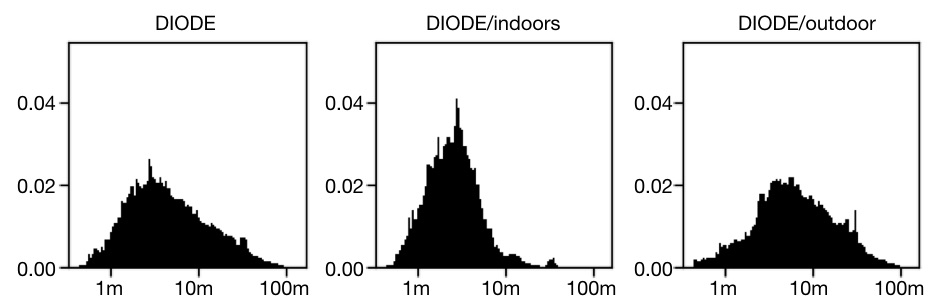
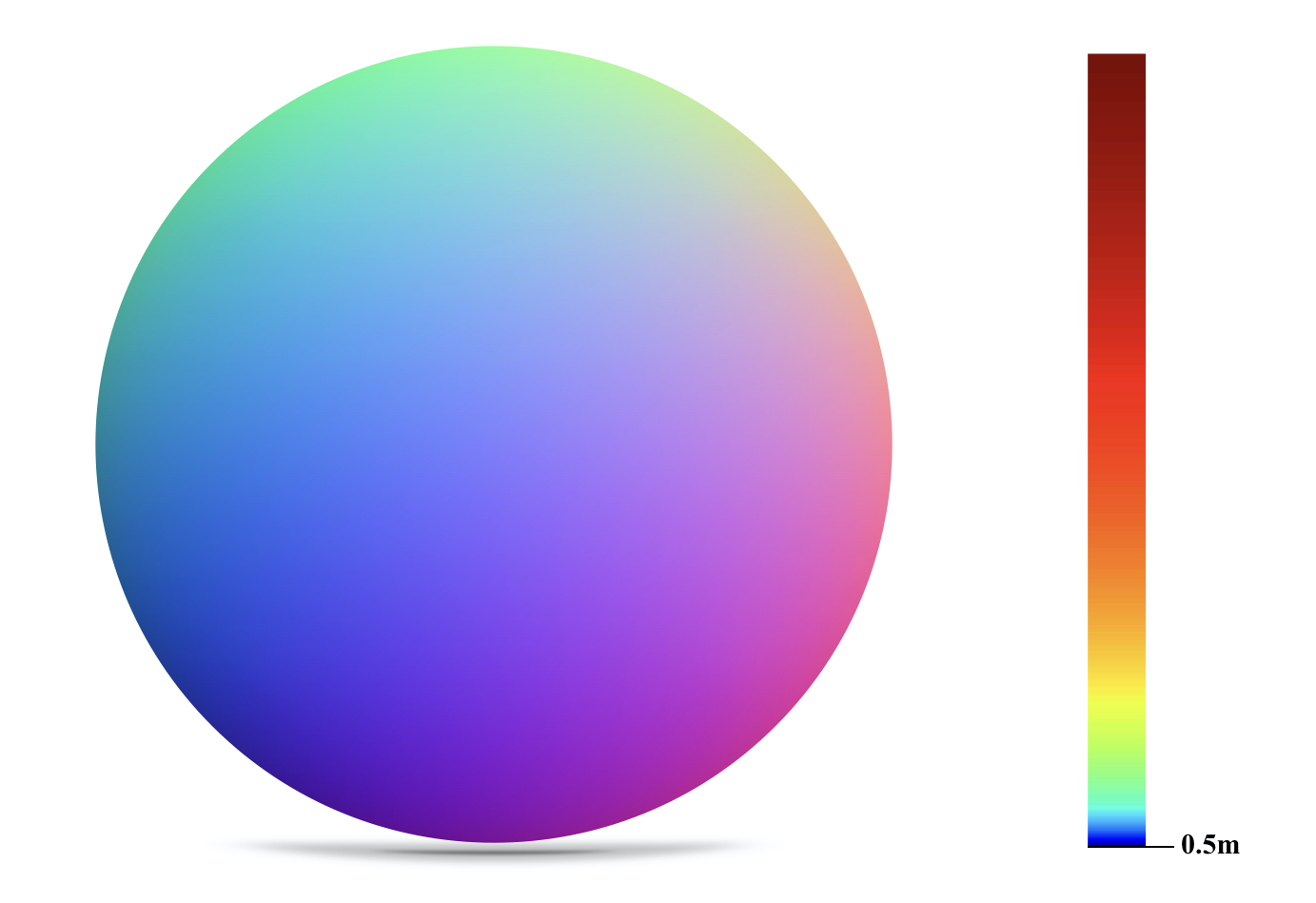 Note: the max range of the depth color scheme is image-specific.
Note: the max range of the depth color scheme is image-specific.
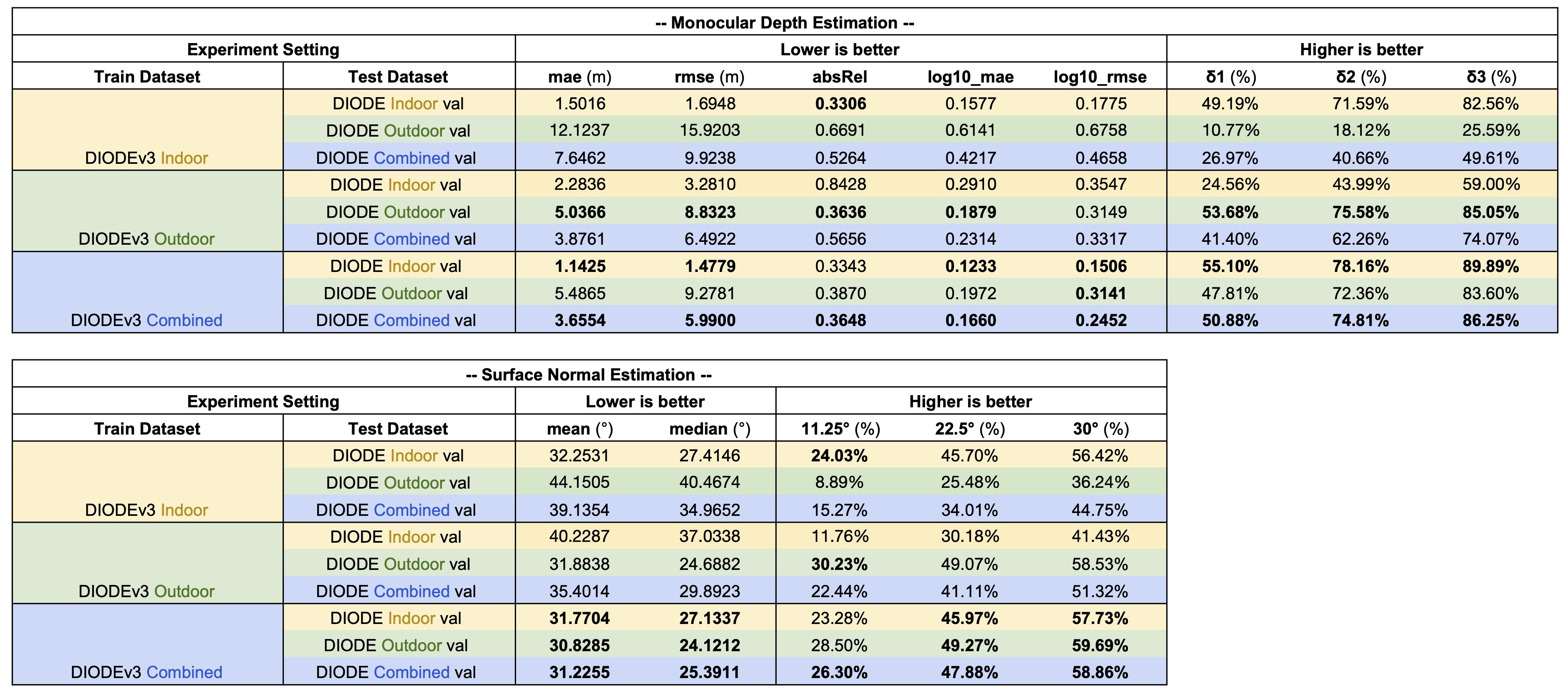
Baseline Performance
Here we provide the baseline performance of monocular depth estimation and surface normal estimation on the DIODE dataset. Please refer to Densedepth, Eigen et al. and our upcoming paper for more detail.
DIODE Development Toolkit
Please visit our official project repository for more information and
DIODE development toolkit.
Devkit Link:
diode-devkit
License
The DIODE dataset and the code is released using the MIT license.
Citation
If you use the DIODE dataset please cite:
@article{diode_dataset,
title={{DIODE}: {A} {D}ense {I}ndoor and {O}utdoor {DE}pth {D}ataset},
author={Igor Vasiljevic and Nick Kolkin and Shanyi Zhang and Ruotian Luo and
Haochen Wang and Falcon Z. Dai and Andrea F. Daniele and Mohammadreza Mostajabi and
Steven Basart and Matthew R. Walter and Gregory Shakhnarovich},
journal={CoRR},
volume={abs/1908.00463},
year={2019},
url={http://arxiv.org/abs/1908.00463}
}
Acknowledgements
This research was in part sponsored by:
- The Air Force Research Laboratory and DARPA under awards number FA8750-18-2-0126 and FA9550-18-1-0166.
- The Robotics Consortium of the U.S. Army Research Laboratory under the Collaborative Technology Alliance Program Cooperative Agreement W911NF-10-2-0016.
Changelog
Last updated: March 31th, 2020